La mayor división del reino animal y el primer robot
Artículo basado en el libro: "Una historia de la inteligencia: Los 5 avances de nuestro cerebro que determinan el futuro de la Inteligencia Artificial" de Max S. Bennet
7 min read

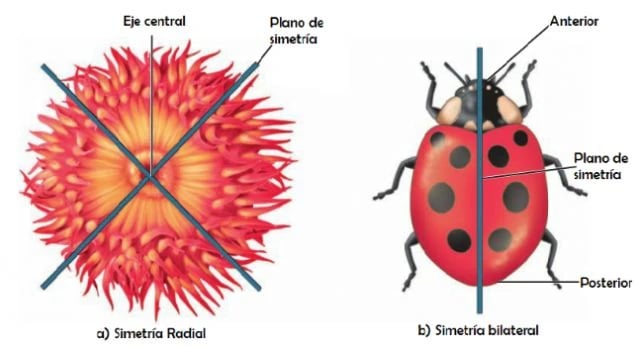
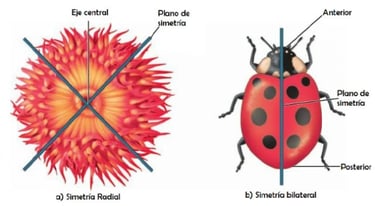
A primera vista, la diversidad del reino animal parece ilimitada; desde las hormigas a los cocodrilos, desde las abejas a los babuinos o desde los crustáceos a los elefantes, las variaciones de los animales parecen innumerables. Pero, ¿cuál dirías que es la característica que más diferencia a un grupo de animales de otro?, ¿los vertebrados y los invertebrados?, ¿los animales con pelo y los animales sin él? Con ambos casos te estarías equivocando, ya que si atendemos a estas características, la diversidad dentro del reino animal nos parecería muy pequeña. Estoy hablando de la simetría. Casi todos los animales del planeta poseen el mismo plano corporal. Todos cuentan con una frente donde se aloja la boca, el cerebro y los principales órganos sensoriales (ojos, orejas…), y todos tienen una parte trasera por donde expulsan sus desechos. Este plano corporal es el denominado bilateral, con un eje que divide el cuerpo en dos partes iguales. Sin embargo, los animales que representan nuestros primos más lejanos (pólipos, corales, anémonas y medusas) muestran una simetría radial; es decir, cuenta con partes iguales que se disponen alrededor de un eje central. No muestran frente y parte trasera. Mientras que los bilaterales introducen la comida por la boca y expulsan los desechos por la parte trasera, Los animales radialmente simétricos solo tienen una apertura, una especie de “boca-trasero” por el que introducen el alimento en el estómago, y luego lo escupen una vez digerido. Aunque se cree que los primeros animales eran radiales, a día de hoy, la mayoría de especies animales (el 90%) son bilaterales. A pesar de la enorme diversidad dentro de estos animales, lo cierto es que desde los gusanos a los seres humanos, todos descendemos de un mismo ancestro bilateral que vivió hace unos 550 millones de años. Pero, ¿por qué los planos corporales de tantos animales han optado por la simetría bilateral en vez de la radial? ¿Cuál es la ventaja evolutiva de este tipo de simetría?
Los planos corporales radialmente simétricos, funcionan bien con la estrategia coralina de esperar por el alimento, pero funciona de manera terrible con la estrategia de caza que involucra desplazarse hacia el alimento. Si eres un animal radial y te quieres dirigir hacia tu alimento, tendrías que disponer de un sistema que te permitiese moverte en cualquier dirección. Los cuerpos bilaterales, por el contrario, hacen que el movimiento sea mucho más sencillo. En lugar de necesitar un sistema motor que le permite moverse en cualquier dirección, solo necesitan un sistema motor que se traslade hacia adelante, y uno que gire. No necesitan escoger la dirección exacta, solo deben ajustar su movimiento hacia la izquierda o la derecha para poder aproximarse al alimento. Los ingenieros modernos emplean este sistema para fabricar los coches, los aviones, los barcos y casi toda la maquinaria de desplazamiento construída. Es el diseño más eficiente para un sistema de movimiento. Además, los animales bilaterales son los únicos que presentan cerebro, y esto no es una coincidencia.
Aunque desconocemos cómo lucían los primeros bilaterales, los fósiles nos indican que eran animales sin patas del tamaño de un grano de arroz. Estos restos indican que aparecieron por primera vez en el periodo Edicárdico, hace entre 635 y 539 millones de años. Se cree que los nemátodos modernos no han cambiado mucho desde los primeros bilaterales, con lo que representan una ventana temporal hacia el funcionamiento interno de nuestros ancestros semejantes a los gusanos. No tienen mucho más que una cabeza, una boca, un estómago, un trasero, algunos músculos y un cerebro. Estos primeros cerebros eran muy simples, como el del nemátodo más estudiado, el Caenorhabditis elegans, que tan solo posee 302 neuronas. Una nimiedad comparado con nuestras 85.000 millones de neuronas. La principal diferencia entre estos animales y los que muestran simetría radial (corales, anémonas…) se basan en que estos gusanos pasan mucho tiempo moviéndose. Si situamos en el extremo de una placa Petri a un nemátodo y en el otro una fuente de alimento, observaremos 3 características: primero, siempre encuentran la comida. Segundo, la encuentran mucho más rápido que si se estuviesen moviendo al azar. Y tercero, que no se trasladan directamente al alimento, sino que lo hacen con un movimiento circular. Estos gusanos no tienen ojos, y se valen de su olfato para aproximarse cada vez más a la fuente de alimento. Solo deben girar en la dirección en la que la concentración de partículas de alimento es mayor, y alejarse cuando esta concentración es menor. Esta direccionalidad puede emplearse tanto para dirigirse a algo, como para alejarse de otra cosa. Los nemátodos poseen células sensoriales que detectan la luz, la temperatura y el tacto. Se alejan de la luz, donde los depredadores les podrían ver, se alejan del calor y del frío nocivos, donde sus funciones corporales son más difíciles de llevar a cabo, y se alejan de superficies punzantes o filosas, donde sus cuerpos pueden resultar heridos. Esta misma estrategia de direccionalidad no era nada nuevo entre los seres vivos, ya que las bacterias emplean los mismos mecanismos. Sin embargo, los nemátodos fueron los primeros organismos pluricelulares (C. elegans tiene unas 1.000 células) en emplear esta estrategia. Pero, ¿qué coño tiene esto que ver con el primer robot?, ¿no iba de eso el artículo? Paciencia y continua leyendo.


Roomba, el primer robot comercial autónomo (Fuente: The Seattle Times)
En las décadas de 1980 y 1990 surgió una escisión dentro de la comunidad de la inteligencia artificial. Por un lado, estaban los que defendían la IA simbólica, que se centraba en descomponer la inteligencia humana en sus partes para intentar dotar a los sistemas de IA de nuestras habilidades más preciadas: el razonamiento, el lenguaje, la capacidad de resolución de problemas o la lógica. Por otro lado, estaban los que defendían la IA conductual, liderados por el experto en robótica Rodney Brooks del MIT. Esta facción creía que el enfoque simbólico estaba condenado al fracaso, ya que siempre será necesario trabajar con niveles de inteligencia más simples para poder descomponer la inteligencia humana. Solo tras millones de años de evolución los organismos pasaron de ser hábiles con sus capacidades motoras y sus movimientos, a desarrollar el lenguaje y la lógica. Brooks indicaba: “El lenguaje y el razonamiento son muy simples una vez que la esencia de ser y la reacción se encuentran disponibles. Esa esencia es la capacidad de moverse en un entorno dinámico, percibir el entorno hasta un grado suficiente como para lograr el mantenimiento necesario para la vida y su reproducción. Esta parte de la inteligencia es dónde la evolución ha concentrado su tiempo; es mucho más difícil”. Es como si unos ingenieros aeronáuticos tratasen de desarrollar un Boeing 747, antes de trabajar con los sistemas de vuelo más sencillos. Al intentar saltarse los aviones simples y construir directamente el Boeing 747, se arriesgan a no comprender por completo los principios básicos de cómo funciona un avión. La ingeniería inversa para comprender el cerebro humano es víctima de ese mismo problema. Por ello, Brooks proponía que un mejor enfoque para el desarrollo de la IA, era incrementar el grado de complejidad con cada paso, y no empezar la casa por el tejado. Es decir, era necesario empezar con cerebros simples y agregarles complejidad. Este punto de vista le permitió a Brooks construir el primer robot doméstico comercialmente exitoso, la “Roomba”.
La Roomba es un robot que recorre de manera autónoma tu casa aspirando el suelo. Fue un éxito inmediato, y la compañía de Brooks ha vendido más de 40 millones de unidades. La primera Roomba y los primeros bilaterales comparten un número sorprendente de características. Ambos muestran sensores muy simples, la primera Roomba podía detectar muy pocas cosas, como cuando se chocaba con una pared, o tenía la batería baja, cómo los nemátodos con la fuente de alimento o la luz. Ambos son bilateralmente simétricos y las ruedas de la Roomba solo le permiten moverse hacia adelante o hacia atrás. Para cambiar de dirección debe girar en su lugar y luego continuar con el avance. La Roomba se aleja de los objetos cuando se encuentra con ellos (con un giro aleatorio) y se acerca su base de carga (alimento) cuando tiene la batería baja (hambre). De hecho, para encontrar la base de carga, simplemente detecta la intensidad de su señal, y gira hacia donde la señal es más intensa, ¡igual que los nemátodos! Ambos se mueven en un mundo complejo sin comprender verdaderamente ese mundo. Mientras que otros permanecían encerrados en sus laboratorios trabajando en robots millonarios que tenían ojos, tacto y cerebros, Brooks construyó el robot más simple posible. No obstante, el mercado, como la evolución, premia 3 cosas sobre todas las demás: cosas que son baratas, cosas que funcionan y cosas que tienen la simpleza suficiente para ser descubiertas en primer lugar. Y como hemos visto, la Roomba cumple muy bien con esos tres criterios.
Artículo basado en: